

解析:无人机在太阳能电池板拍摄中因何坠落?
人们纷纷开始使用小型“无人机”来检测百万光伏电站太阳能电池板故障。从空中拍摄百万光伏电站全景的情形也在增加。
发电运营商和相关服务运营商为了使小型无人机更稳定地飞行,下了不少功夫来防止运行时的控制相关故障和坠毁等事故。
例如,设定合适的飞行路线和高度,实现不依赖操作人员是否熟练的自动飞行等也是这类措施之一。
但只要是飞行,就无法完全避免坠落等事故。万一坠落时,除尽量避免机体造成光伏电站内外的设备和人员等受伤的二次伤害外,还要加入保险等,采取了多种对策。
详知小型无人机的技术人员表示,即使是飞行中从未发生过坠落事故的经验丰富的运营商,也难保在10年、20年的长期飞行中一直保持“零坠落”。应该以此为前提,在万一坠落时也能充分应对的情况下运用。
该技术人员分析称,坠落事故的原因,维护不力约占7成,对飞行场所判断失误约1成,操作失误约1成,还有约1成是因为意料之外的原因。对飞行场所的判断失误,是指在不符合飞行条件的场所飞行等判断错误。
这里介绍一下在“百万光伏电站业务”采访过程中发生的小型无人机坠落事例(图1)。

图1:坠落的小型无人机在关东北部的光伏电站内飞行时坠落(摄影:日经BP社)
机身失衡,瞬间坠落
目击的坠落事故,发生在笔者正采访小型无人机在关东北部某光伏电站内飞行情况之时(图2)。配备6个螺旋桨的小型无人机搭载了拍摄普通图像的数码和红外两台相机。当时是6月下旬的一个下午。

图2:坠落前的无人机机体配备了6个螺旋桨(摄影:日经BP社)
这座光伏电站的阵列(在架台上设置太阳能电池板的单位)沿东西方向伸展。由纵向4张、横向6张电池板构成的阵列自西向东排有20个阵列。由南向北配置7排。最南端和最北端的两列构成有不同。
自动飞行路线如下:首先,从发电站西侧的空地起飞,在最南部一排南面的空间,自西向东沿直线飞过15个阵列;接着,移动到北方两排相邻的行列之间,自东向西沿直线飞过15个阵列。之后以相同的要领反复移动,沿东西方向合计飞行4次后降落(图3)。
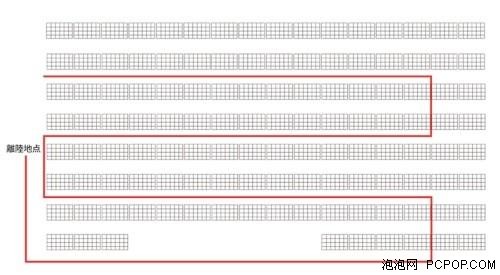
图3:计划的自动飞行路线由于是演示,未飞临电站内的所有区域(出处:日经BP社)
当飞行接近最终阶段,眼看将要降落时,无人机的机身失去平衡,瞬间坠落到了地上。从看到失去平衡后,机身就开始加速下坠。
电磁波妨碍了平衡控制,未能锁定发生源
飞行相关人士称,坠落的原因,是“在机身失衡地点附近,受到了电磁波的影响”(图4)。他分析道,因某种原因产生的电磁波阻碍了地磁传感器检测方向,导致无法控制机身平衡而导致坠落。

图4:刚刚坠落的无人机从多个角度拍摄(摄影:日经BP社)
在发生坠落事故后的调查中,确认了无人机配备的飞行记录器记录了磁数据的异常,无人机失衡地点附近的某处发生了电磁波。但该地点周围却只有太阳能电池板、架台和连接电缆等。
还发现,电磁波在发电量高的时段会更强。
据称,以前有过光伏逆变器(PCS)产生的电磁波引发故障的事例,但据称此次不是PCS的影响。
太阳能电池板几乎没有会产生电磁波的因素。但由于认为电磁波发生源的场所附近还有电池板,因此慎重起见对电池板进行了调查,确认了其不是电磁波发生源。因此最终未能完全查明原因。
将飞行高度升高至2倍,避开电磁波的影响但因明确了原因是光伏发电设备周边发出的电磁波,所以采取了对策。进一步提高了飞行高度,可以避开电磁波的影响飞行。
坠落时的飞行高度约为20m。因此将高度升至约40m后,确认了可以不受电磁波的影响顺利飞行。
就飞行高度与图像清晰度的关系而言,如果飞行高度为40m,利用原来使用的640×512像素红外相机,可由自动飞行拍摄清晰显示热分布的图像。飞行高度为20m的话,利用分辨率较差的320×240像素红外相机也能拍摄热分布,但可能会受电磁波据称,用受到电磁波影响的地磁传感器检测方向对自动飞行必不可少。但如果改为无线电控制等手动飞行,则不用亦可。
但手动飞行时,飞行的安全性取决于操作人员的熟练度。存在人为失误的可能性,难以稳定利用。另外,由于要在操作人员的可视范围内操作,飞行速度的提高受到限制,与自动飞行相比,利用效率会降低。
该企业介绍说,基于上述理由,打算通过能实现更安全的自动飞行的研究,提高飞行控制经验和利用经验。
关注我们



{kind=link}
{kind=link}
{kind=link}
{kind=link}